

Shadow Robot Builds Hand That Learns Through Touch and Impact
By embedding hundreds of sensors into each finger, Shadow Robot is enabling durable, data-rich hands for next-generation AI and automation


Robotic hands may look impressive on a demo floor, but getting them to perform in the real world — gripping, manipulating, and adjusting like humans — remains one of engineering’s most challenging problems. Shadow Robot believes the key to solving it lies not in mimicry, but in data.
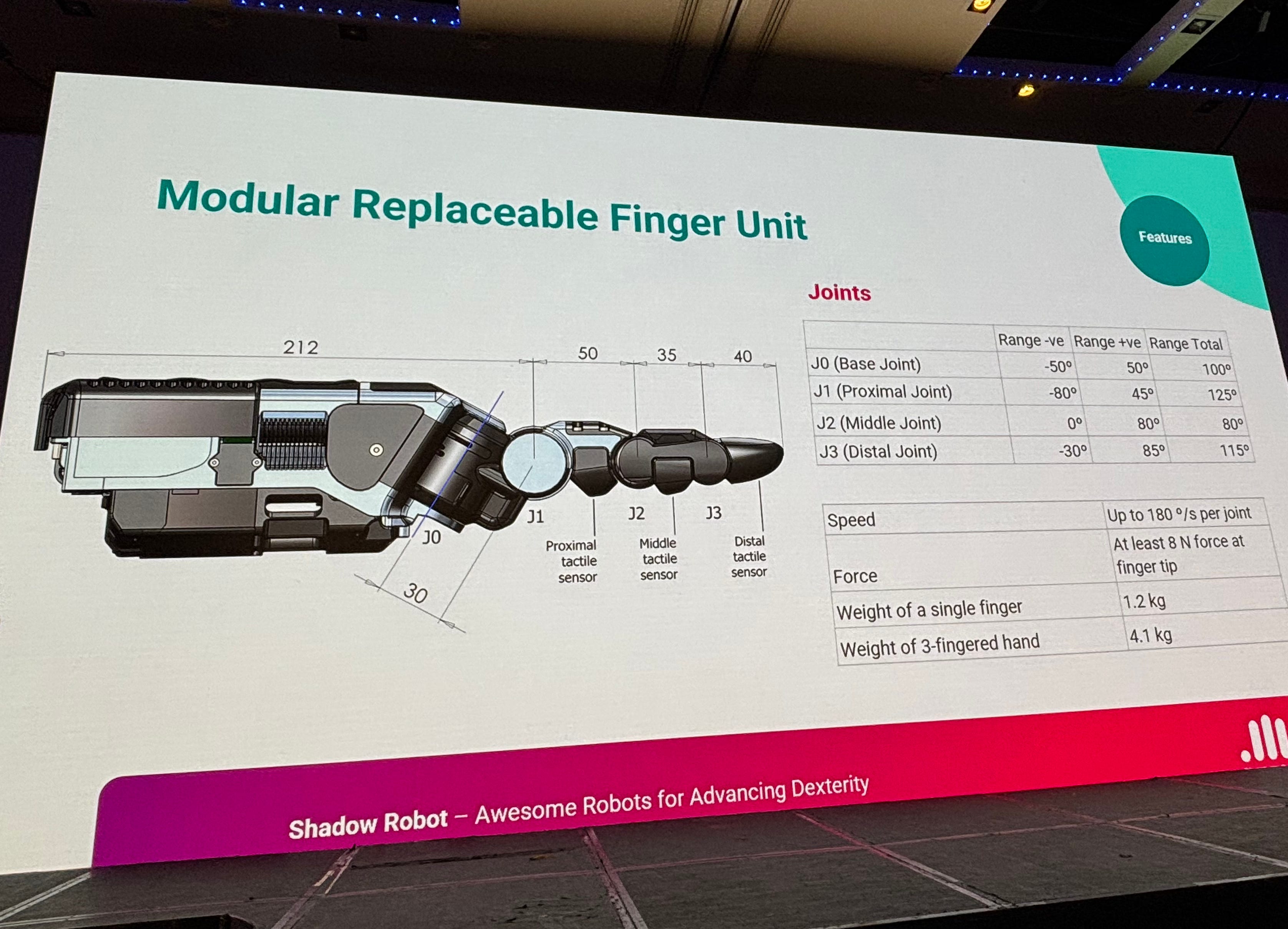
The London-based company has developed a robotic hand, DEX-EE, that is engineered not just to move with human-like agility but to feel and learn from that sensation. Each finger is embedded with hundreds of tactile sensing points, known as “taxels,” capable of detecting minute changes in pressure and deformation. Hidden inside the fingertips are stereo cameras, enabling the system to see the surface it touches, while mechanical sensors on the middle and base joints track force and motion.
Combined, these create a stream of rich, high-resolution sensory data—the foundation machine learning models need to master real-world manipulation tasks.
Walker emphasized that sensor-rich data was critical for robotic learning.
“One thing we know is that learning systems need lots and lots of data, huge amounts,” he said. “Robots that produce six degrees of freedom, joint command information, and not many others, give you real trouble learning.”
Rather than avoiding physical interaction, Shadow Robot embraced it.
“When I do grasping and manipulation, collision is my bread and butter,” Walker said.
That realization reshaped how the company approached hand design — not by replicating the human hand, but by creating a reliable, configurable system that could take damage, reset, and keep learning.
This dual priority — precision and resilience — makes DEX-EE uniquely suited for the next wave of robotics: systems that operate autonomously in human-centered environments, such as logistics, healthcare, and home assistance. Without hands that can physically explore and learn safely, real-world applications of AI will remain out of reach.
From Research Lab to Real World
The DEX-EE hand was officially announced on May 9, 2025. Later that month, it was demonstrated to the public for the first time at ICRA—the IEEE International Conference on Robotics and Automation—where it appeared alongside many of the world’s top manipulation systems.
“I lost count of how many robot hands there were at ICRA,” Walker told the audience at the Humanoids Summit in London. “I asked a very senior professor in robot handology to go and have a look, and he said he lost count at about 25. So I think what that says to me is this is a really exciting time for our field.”
Developed in partnership with Google DeepMind, DEX-EE was explicitly built for trial-and-error learning that defines modern robotic training. Unlike previous hands designed primarily for demonstration, this one is intended to endure failure and keep going.
“They said, ‘We’d like to do some really interesting research in learning with robot hands, and we’d like the robot not to break very much while we do that,’” Walker recalled of DeepMind’s request.
Shadow Robot responded with a modular, durable design and is dense with sensors. The hand is about 50% larger than a human’s, intentionally so.
“We built the least human-like dexterous robot hand we think anyone has built so far,” Walker said.
Each finger contains high-resolution optical touch sensors in the fingertips — stereo cameras with internal dot-pattern illumination — and magnet-based Hall effect sensors in the mid and base joints. The system outputs high-speed, multidimensional data about contact, force, and motion.
“Three is the minimum you need to be able to do interesting tasks where you hold something and manipulate it,” Walker explained. “We can, of course, build more.”
The platform’s modularity allows customers to configure hands with different numbers of fingers depending on the application.
“We were talking to somebody in the logistics space a year or so ago, and they said, could you do 12 fingers?” he said. “And we all just scratched [our heads], yeah, why? And then they explained the problem, and we’re like, yeah — 12 fingers would make complete sense for that problem.”
A Long Horizon, Now Backed
In 2025, Shadow Robot received £11 million in funding from ARIA — the UK’s Advanced Research and Invention Agency — to support two new long-term research initiatives.
ARIA was founded in 2023 to fund “high-risk, high-reward” science projects. Its mission is similar to that of the U.S. Defense Advanced Research Projects Agency (DARPA), which has historically backed breakthrough innovations like GPS and the Internet but without military affiliation.
Walker described the funding as crucial to pushing robotic manipulation forward.
“What ARIA has done is said: Look, this is a long-horizon problem. You can't solve it in a month. You can't solve it in six months. You probably can't solve it in a year. You need to go away and think about this and come back and address the fundamentals.”
That mandate aligns closely with Shadow’s hardware-first philosophy. “We’ve lots of fail states in,” he said. “We spent lots of time monitoring what was happening with the robot, running long tests to see what was happening.”
A new internal communication bus, developed in-house, allows each phalange to stream dense data at high speed.
Testing was as rigorous as it was unconventional.
“We spent about three years doing what we politely described as hitting the robot with sticks,” Walker said. “It’s quite unpleasant to do yourself, by the way, as well. Don’t do that at home.”
The result is a platform that prioritizes uptime and stability, enabling researchers to focus on software development rather than constant maintenance.
“People doing learning experiments don’t want to deal with mechanical engineering problems,” Walker said. “They want to deal with machine learning problems, so they don’t want to deal with broken robots.”
The company’s presence in London has long been part of its identity. In 2018, when Shadow opened its first robot factory in the city, Keir Starmer—then a local MP, now the UK’s Prime Minister—attended the ribbon-cutting and praised Shadow’s role in building London’s tech future.
“London and the UK have a proud history of leading the world in new and innovative technologies,” he said at the time. “It’s essential we protect this legacy and continue to invest in the jobs and the economy of the future.”
From Fragility to Scalability
At the Humanoids Summit on May 29, 2025, an audience member asked about scaling the technology for large deployments. Could DEX-EE be used in logistics, moving goods like T-shirts or jackets from bin to bin?
Walker didn’t offer a precise training timeline but emphasized that the hand was designed to support real-world workloads.
“The fact that it was robust meant that it was now worth them trying to do that task,” he said, describing one industrial customer’s motivation. “Those are the areas where they’re starting to go, yeah, actually, with this hardware, we can handle the wide range of components and do those tasks as a feed-in process.”
Another question focused on production scale.
“The classic Shadow Hand, we’ve made somewhere in the 150 to 200 of them. It’s not mass market at all,” Walker said. “The new hand — we’ve made about 20 to date. We’re ramping up production on that. It’s a nice, manufacturable hand because it was built for maintainability.”
He added that manufacturability wasn’t originally part of the design goal, but it has made scaling easier. As more robotics teams seek robust manipulation platforms for learning, the demand for adaptable, resilient hands may rise.
The company also plans to host an entrepreneur-in-residence for the next four years to explore new ways to bring its technology to market. But for now, the focus remains on long-term capability and solving the most challenging problems in robotic interaction.
“We’re still trying to work out how to push that last step forward with robot hand technology,” Walker said. “And make dense hands that are robust and human-like.”
