

AI, Magnetic and Nano-Scale Robotics Drive New Surgical Frontiers
Advanced medical robotics showcased novel traction systems, flexible dual-arm devices, nano-swarm therapies, and autonomous surgical AI during a media visit

The rapid escalation of gastrointestinal diseases and cardiovascular emergencies is intensifying global demand for safer, faster, and more precise surgical interventions. Against this backdrop, researchers are advancing magnetic robotics, flexible dual‑arm surgical systems, autonomous AI‑driven procedures, and nano‑scale micro‑robotics—technologies aimed at transforming how clinicians diagnose, navigate, and treat complex conditions.
On November 7, dozens of foreign and mainland Chinese journalists were invited to visit the Multi‑Scale Medical Robotics Center (MRC) at the Hong Kong Science Park.
The media tour was part of the 2025 Hong Kong Laureate Forum, which was organized by the Hong Kong Laureate Forum (HKLF) and sponsored by the Lee Shau Kee Foundation in partnership with the Shaw Prize Foundation.
During the visit, journalists examined five cutting-edge systems spanning early cancer intervention, robotic tissue dissection, stroke treatment using nano-robots, and automated surgical planning. The demonstrations highlighted how robotics, imaging, and AI could dramatically reduce operating time, lift surgical precision, and ease clinical workload.
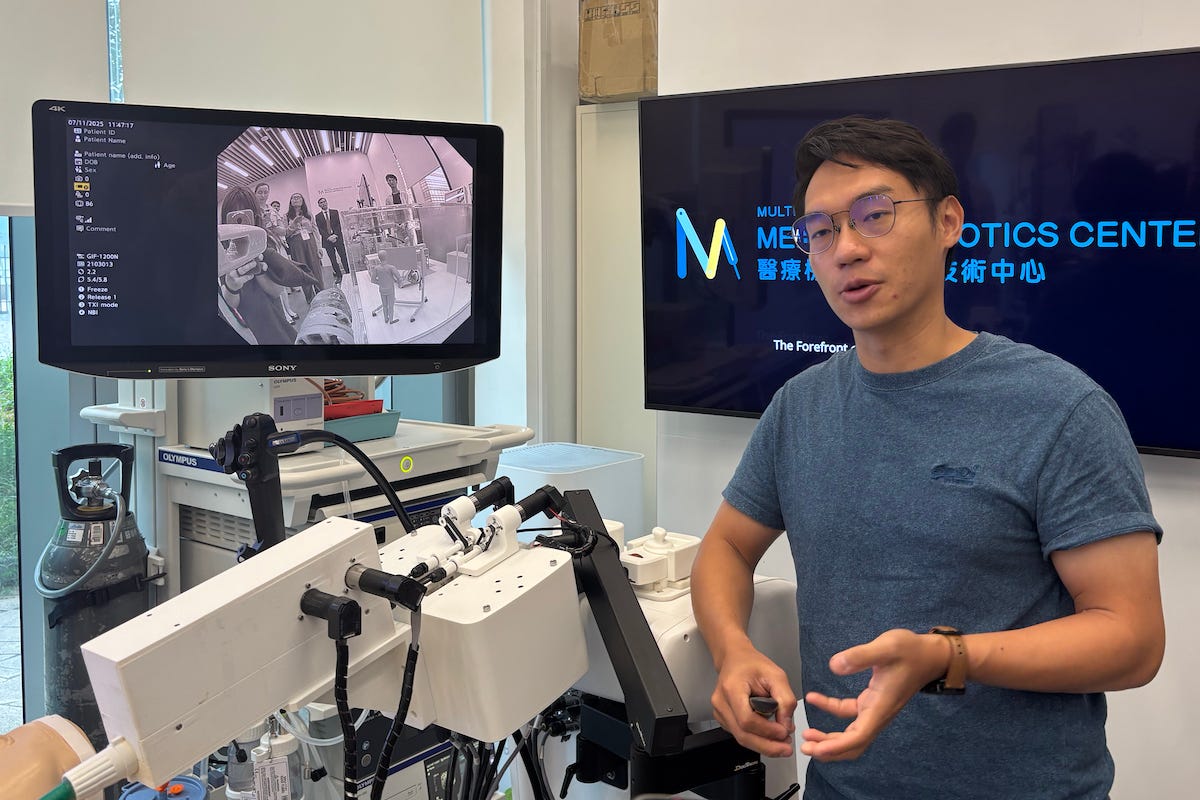
Magnetic Endoscopy Innovation

Jason Lam, Biomedical Engineer at MRC, outlined how magnetic forces can improve endoscopic navigation, easing the difficulties surgeons face when manually steering scopes through complex passages.
His team is developing a magnetic endoscope guided by X‑ray imaging and external magnets so that surgeons can move the device more precisely inside the body and shorten the time needed to locate wounds or lesions.
“We save time by using X‑ray and magnetic force to guide the endoscope inside the patient’s body,” he said.
Lam added that the MRC validates new instruments in both cadaver and animal models. Most cadaver samples come from the Faculty of Medicine at the Chinese University of Hong Kong (CUHK), while rare cases are imported from the United States under dedicated licences. That pre‑clinical pipeline, he said, is critical for assessing safety and performance before the magnetic systems are considered for human use.
Endoscopic Cancer Intervention
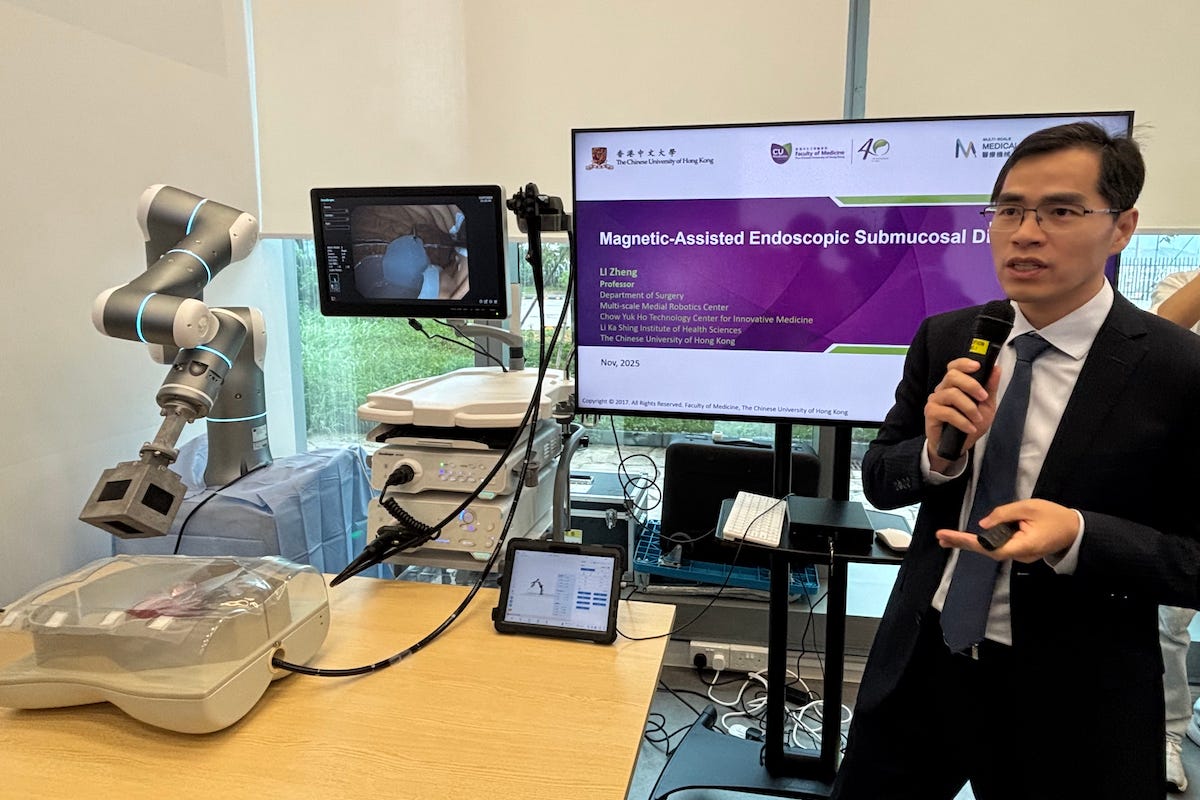
Zheng Li, Professor in the Department of Surgery at CUHK, underscored the scale of gastrointestinal (GI) cancers and the case for earlier, organ‑sparing treatment.
Li noted that GI cancers account for about 4.8 million new cases a year worldwide and over 3 million deaths, roughly one‑third of all cancer fatalities. He said that because a colon lesion can take 10 to 12 years to progress from a small polyp to invasive cancer, there is a long window for screening and less invasive intervention.
Li focused on endoscopic submucosal dissection (ESD), a technique used to remove early‑stage GI cancers. In conventional ESD, surgeons work through a single endoscope channel with one knife that moves with the camera, which he likened to “cutting a steak with a knife that is not in your hand.”
His team’s magnetic‑assisted system adds a flexible magnetic retractor and external robotic arm to provide dynamic traction. Animal tests have shown shorter procedure times, faster dissection, and lower workload, with human trials now underway.
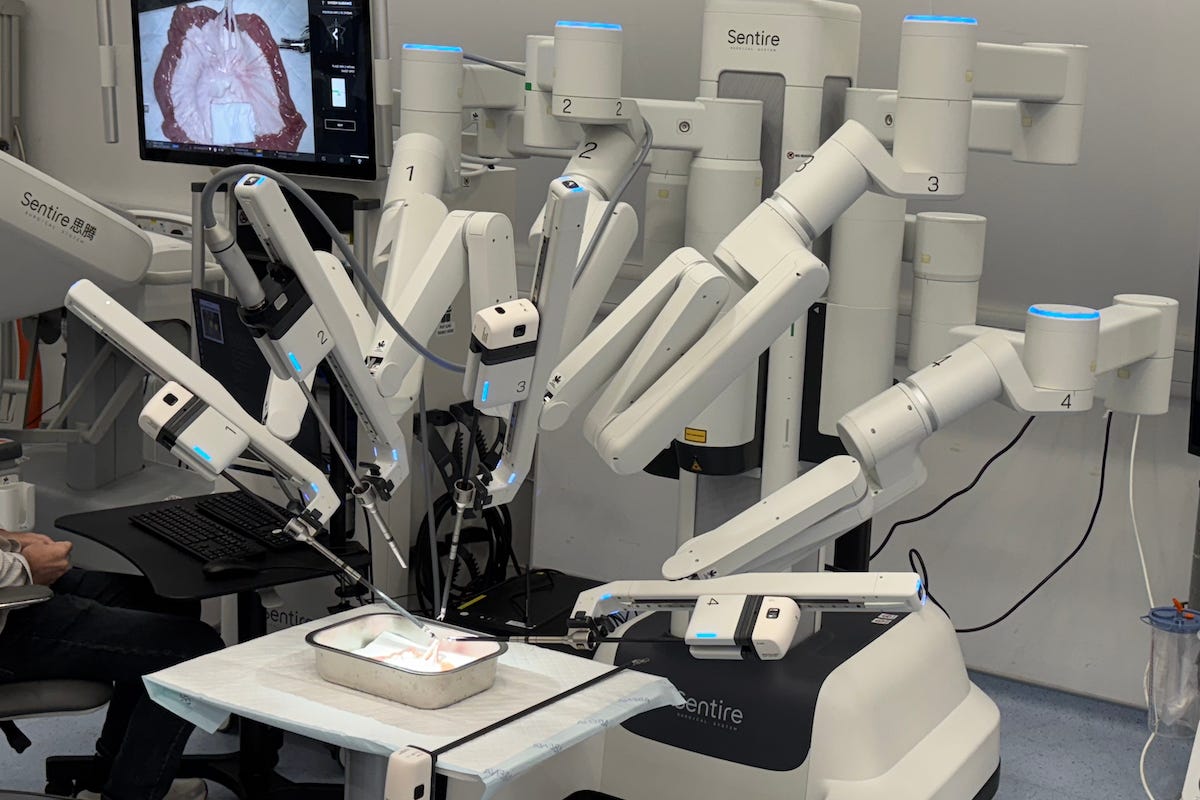
Flexible Dual-Arm Robotics
Ka‑chun Lau, Principal Engineer at MRC, presented a flexible dual‑arm robotic system that aims to perform an entire ESD procedure robotically inside the stomach or colon. Developed since 2017, the system delivers two slender robotic arms through an overtube from the mouth or anus into the body cavity. One arm is fitted with a gripper to retract tissue, while the other carries a high‑voltage, low‑current electrocautery knife for dissection.
Lau said the system is designed to tackle a key limitation of conventional endoscopes: the lack of a true “second hand” for traction. An additional endoscope provides a separate bird's-eye view so that vision is decoupled from tool movement.
In live pig experiments, his team removed lesions of around 20 millimeters in about 30 minutes, compared with roughly three hours for standard procedures. All patient‑contact components are disposable, and an ethics‑approved framework is in place as they prepare for human trials.
Nano-Scale Robots for Stroke Treatment
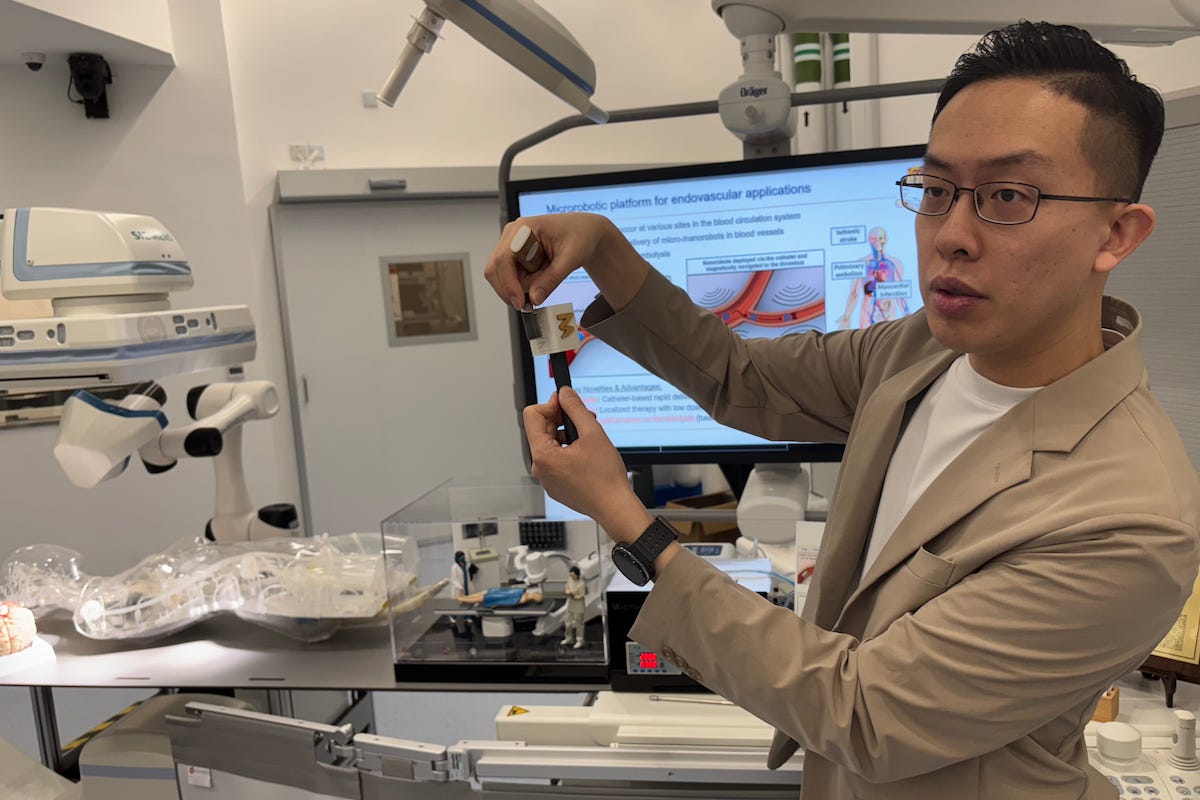
Tony Chan, Research Assistant Professor at the Chow Yuk Ho Technology Centre for Innovative Medicine, showcased nano‑robots designed to tackle stroke by reaching blood clots in tiny, tortuous brain vessels. He reminded visitors that stroke is one of the world’s most common diseases and the second leading cause of death, and that existing drugs and catheter‑based treatments struggle to access distal vessels.
Chan’s team uses iron‑oxide nano‑robots that carry a clot‑dissolving drug and respond to external magnetic fields.
“Here are millions of nano‑robots… rotating and brushing as they respond to the magnetic field,” he said, describing how they tumble over the clot to combine mechanical agitation with chemical action.
Experiments suggest the approach can cut drug dosages while greatly speeding up clot dissolution. The group has tested the system in realistic placenta‑based vascular models and in vivo animal studies, and is now moving to larger‑scale safety and efficacy work.
Automation Through Surgical AI
Qi Dou, Assistant Professor in the Department of Computer Science and Engineering at CUHK, demonstrated an AI framework that automates common steps in robot‑assisted surgery.
Her team’s Vision-Perception-Trajectory-Vision (VPTV) system combines four elements: visual parsing to act as “the eyes” of the robot, perceptual regression and policy learning as its “brain”, motion planning, and a visual servo controller that turns plans into precise movements.
Using a stereo camera, the AI identifies instruments, vessels, and surrounding anatomy, then predicts trajectories for different robotic arms. Dou’s group has used it to automate tasks such as vessel clipping and knot‑tying, including a “third arm” that operates alongside two human‑controlled arms in animal surgeries.
“As long as you understand the whole environment, you can place any arm in,” she said. Recent live animal trials, including procedures on a pig stomach, are being used to benchmark how reliably the system copes with breathing motion and other real‑world disturbances.
The Next Phase of Medical Robotics
Speakers said the next phase of development will focus on expanding clinical testing and refining system reliability. Magnetic traction platforms are progressing through human trials, while dual‑arm robotic systems are preparing for further validation across more gastrointestinal procedures.
Nano‑robot research is expected to continue in larger animal models to assess safety, drug‑delivery efficiency, and retrieval rates. Teams are also evaluating alternative robot shapes and materials to broaden the potential medical applications.
For surgical AI, researchers aim to strengthen planning accuracy and improve performance in unpredictable environments such as breathing motion or shifting anatomy.
They noted that wider adoption will depend on evidence from larger studies, regulatory review, and cost considerations, adding that engineering–clinician collaboration remains essential for moving these technologies toward clinical use.